综合智慧能源 ›› 2026, Vol. 48 ›› Issue (2): 47-58.doi: 10.3969/j.issn.2097-0706.2026.02.005
何龙庆1( ), 李小勇2(), 石鑫2(), 姜寒3(), 李玉强4(), 王永君4(), 王凯1,*()
), 李小勇2(), 石鑫2(), 姜寒3(), 李玉强4(), 王永君4(), 王凯1,*()
收稿日期:2025-09-15
修回日期:2025-11-30
出版日期:2026-02-25
通讯作者:
*王凯(1985),男,教授,博士生导师,博士,从事新型电力系统智能控制与安全防御、新能源储能器件状态评估和寿命预测、储能元件、新能源的存储和转化、能源互联网等方面的研究,wkwj888@163.com。作者简介:何龙庆(2002),男,硕士生,从事变电站智能巡检、机器视觉等方面的研究,hlq20011225@163.com;基金资助:
HE Longqing1(), LI Xiaoyong2(), SHI Xin2(), JIANG Han3(), LI Yuqiang4(), WANG Yongjun4(), WANG Kai1,*()
Received:2025-09-15
Revised:2025-11-30
Published:2026-02-25
Supported by:摘要:
针对变电站复杂动态工况下智能巡检机器人定位建图精度衰减问题,提出一种融合改进CA-YOLOv5目标检测的增强型定位与地图构建架构。采用多模态注意力机制优化CA-YOLOv5网络,构建动态目标实时识别框架;通过语义-几何联合约束策略,在特征匹配阶段建立动态区域掩膜与运动概率模型;设计基于时空一致性的动态特征过滤算法,在捆绑调整优化环节实现动态干扰源的精准剔除与静态场景结构的有效保留。在公开数据集与真实动态场景中的对比试验表明,改进系统将动态环境下的定位误差降低43.7%,地图重建完整度提升41.5%,同时维持良好的实时处理性能。融合框架解决动态元素导致的误匹配与地图污染问题,有效克服了变电站典型动态干扰。
中图分类号:
何龙庆, 李小勇, 石鑫, 姜寒, 李玉强, 王永君, 王凯. 基于YOLOv5与ORB-SLAM融合的变电站动态场景特征点筛选算法改进[J]. 综合智慧能源, 2026, 48(2): 47-58.
HE Longqing, LI Xiaoyong, SHI Xin, JIANG Han, LI Yuqiang, WANG Yongjun, WANG Kai. Improvement of feature point filtering algorithm for dynamic scenarios in substations based on fusion of YOLOv5 and ORB-SLAM[J]. Integrated Intelligent Energy, 2026, 48(2): 47-58.
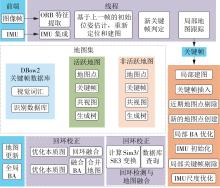
图1
ORB-SLAM3算法框架
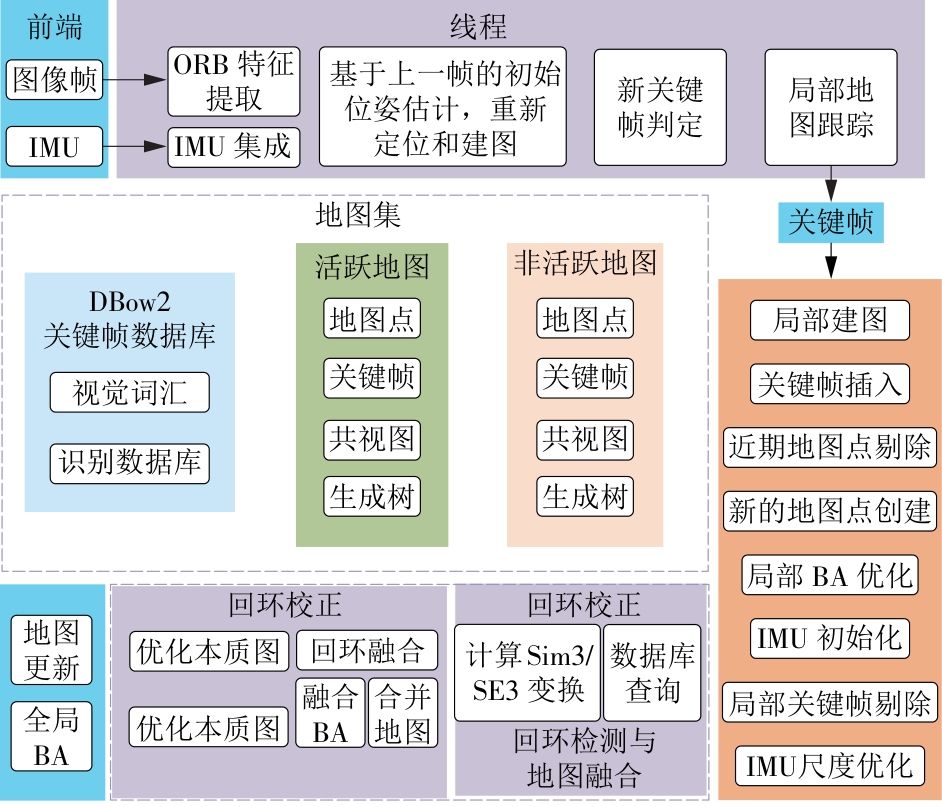
图2
CA机制原理
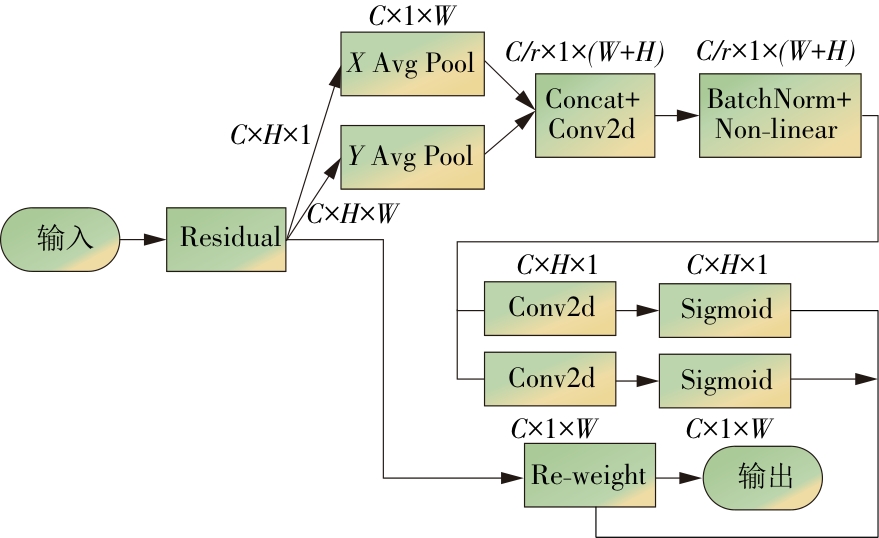

图3
YOLOv5-CA及其改进算法的框架
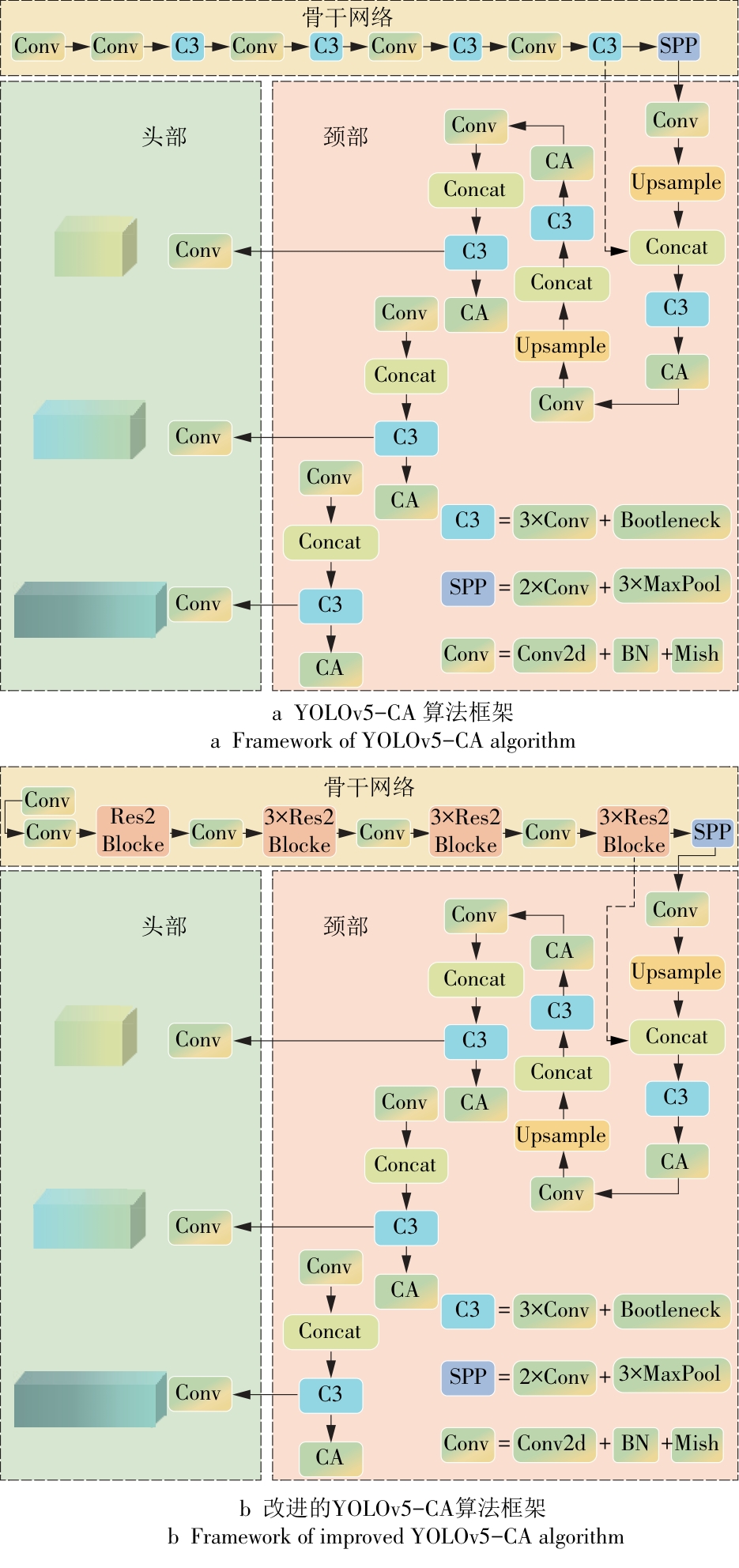
图4
YOLOv5-CA与ORB-SLAM融合算法流程框架
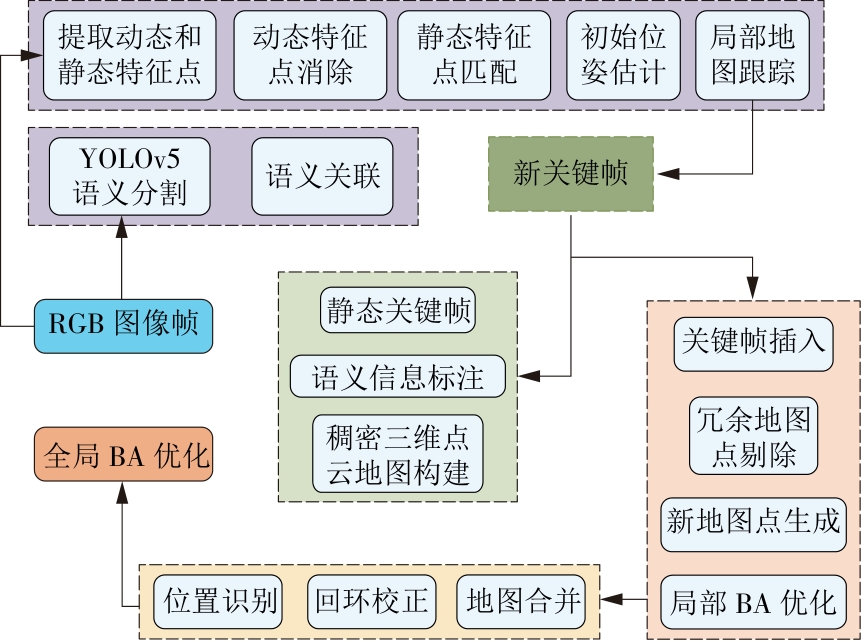

图5
稠密地图


图6
特征点提取对比
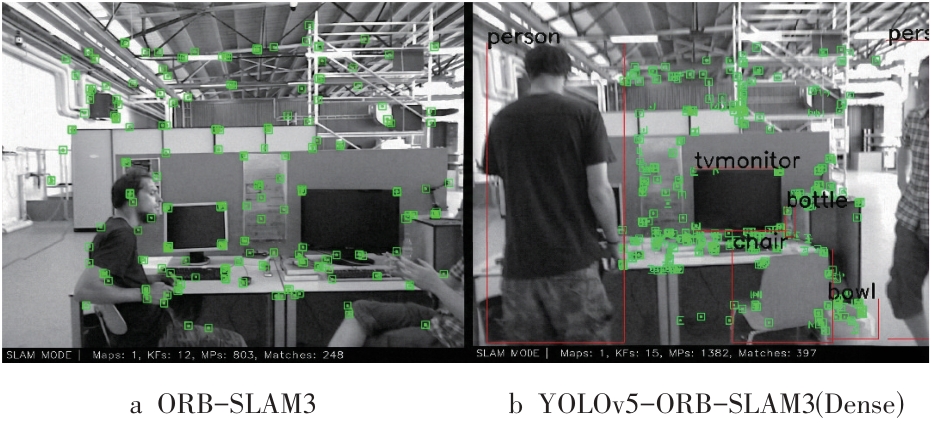

图7
APE结果对比
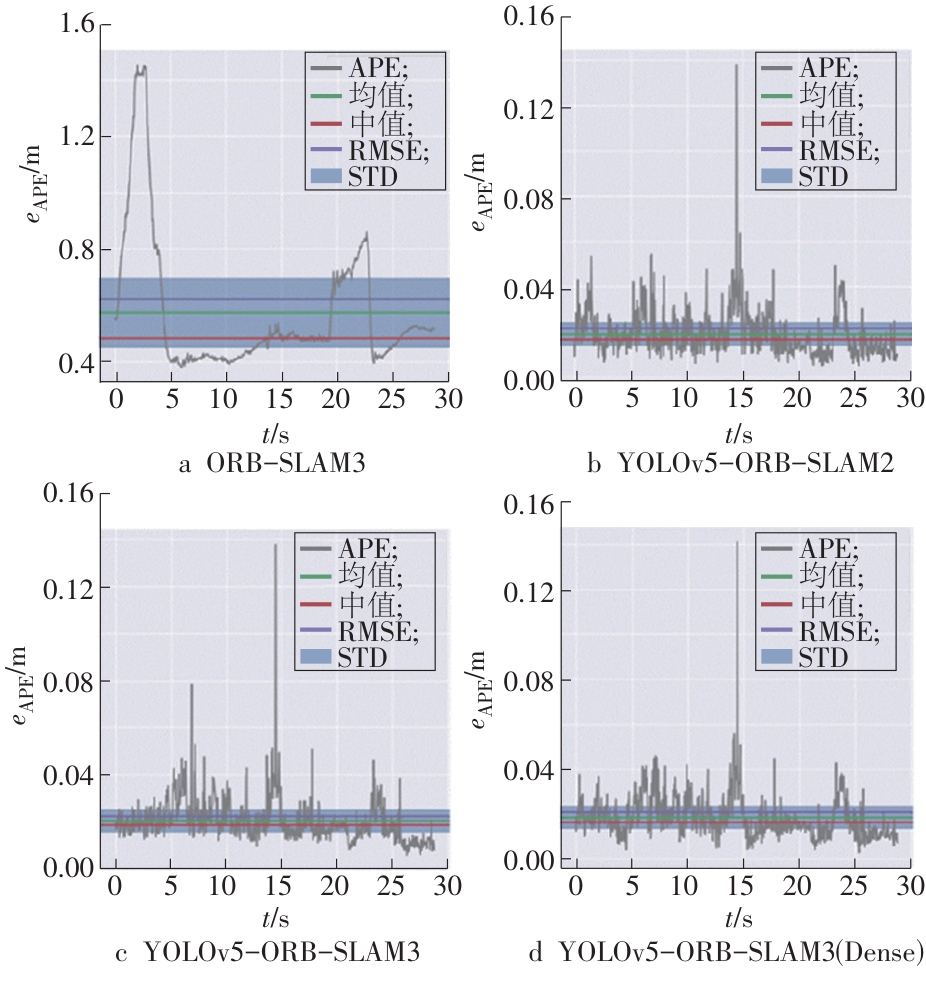
图8
APE轨迹映射
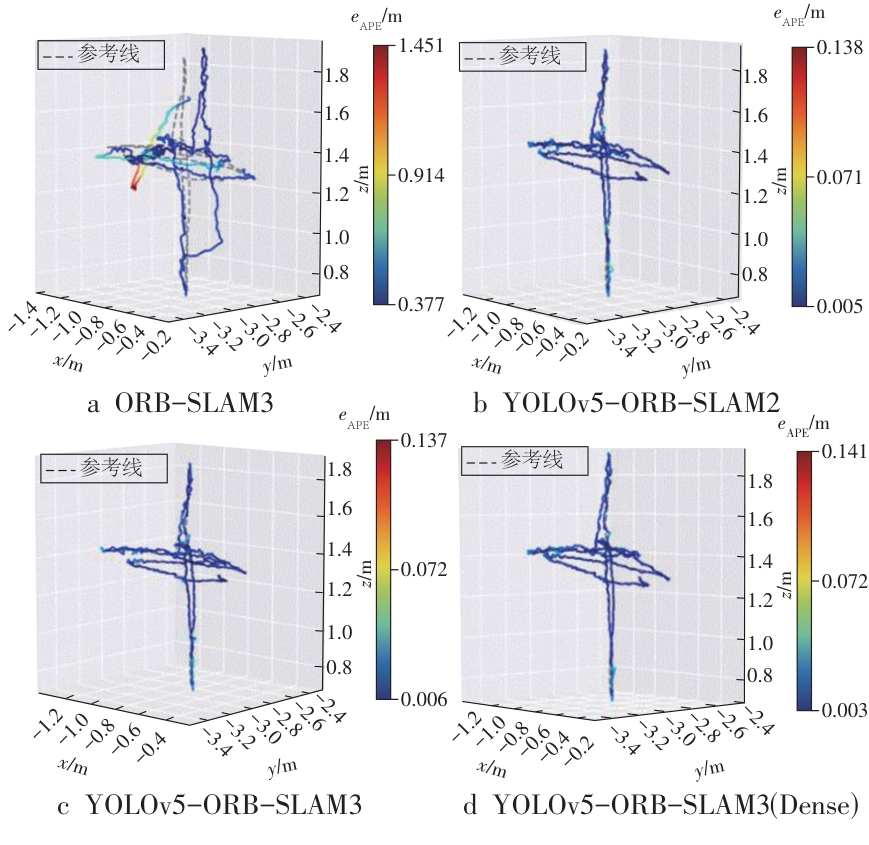

图9
RPE结果对比
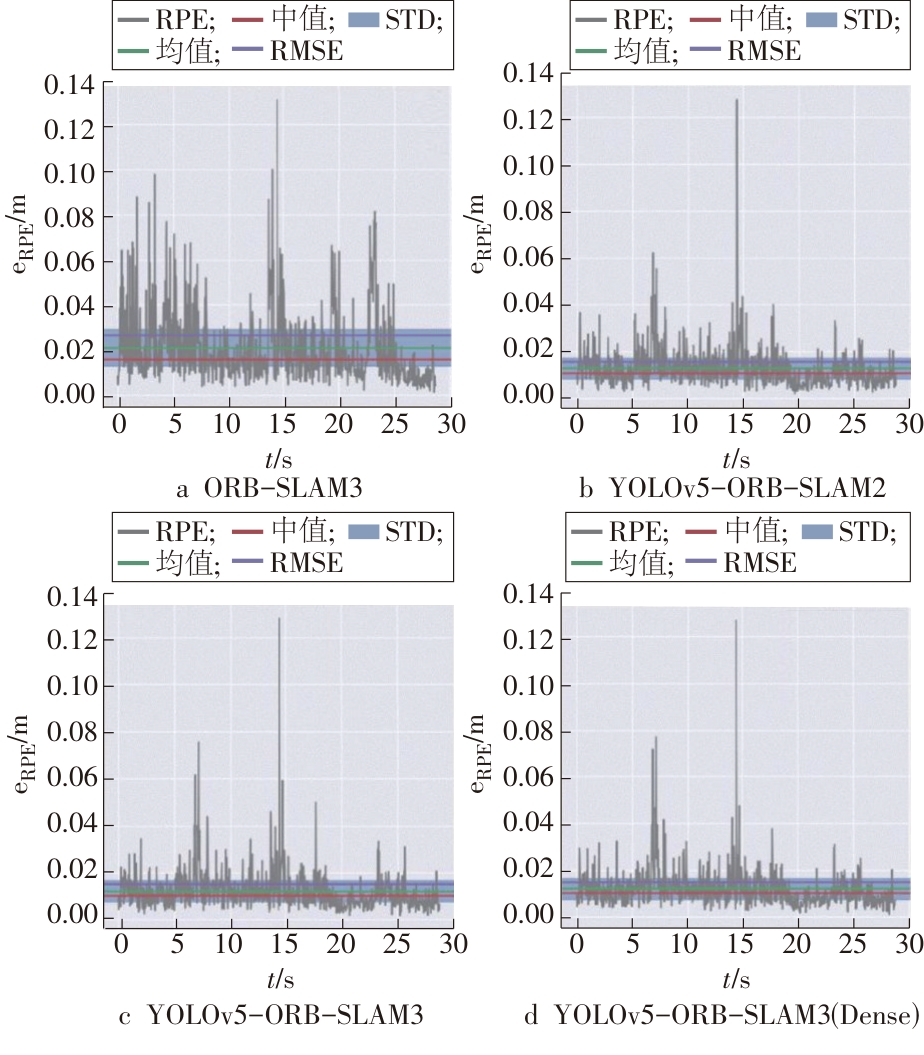
图10
RPE轨迹映射
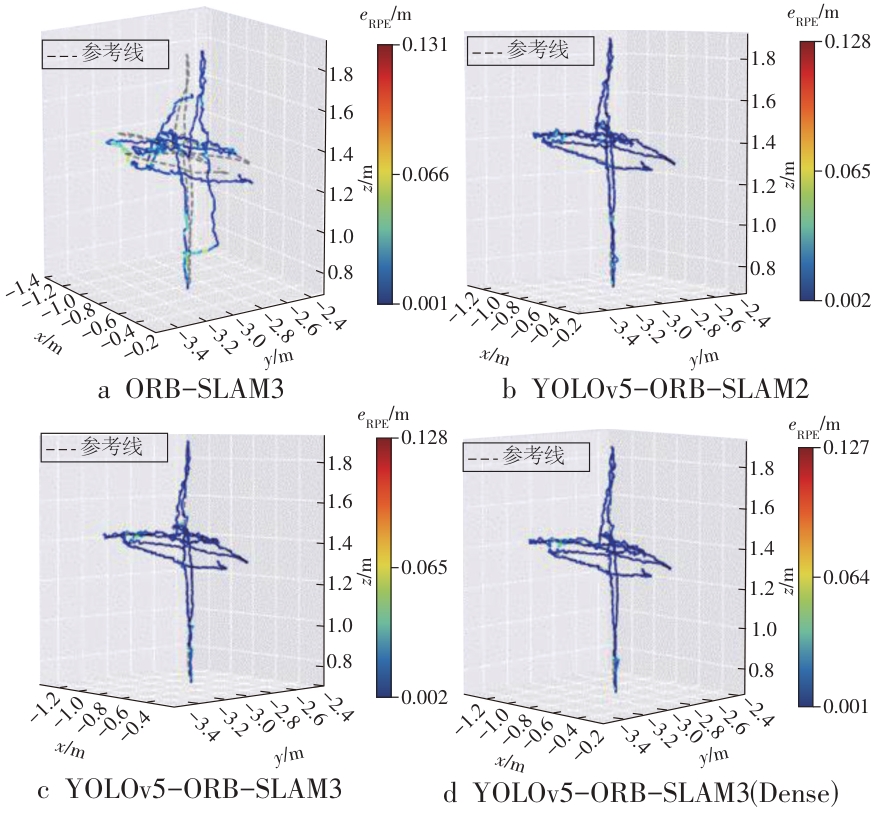
表1
APE结果对比
| 算法 | RMSE | 均值 | 中值 | STD |
|---|---|---|---|---|
| ORB-SLAM3 | 0.622 | 0.573 | 0.483 | 0.241 |
| YOLOv5-ORB-SLAM2 | 0.022 | 0.019 | 0.017 | 0.010 |
| YOLOv5-ORB-SLAM3 | 0.023 | 0.021 | 0.019 | 0.009 |
| YOLOv5-ORB-SLAM3 (Dense) | 0.020 | 0.018 | 0.016 | 0.009 |
表2
RPE结果对比
| 算法 | RMSE | 均值 | 中值 | STD |
|---|---|---|---|---|
| ORB-SLAM3 | 0.027 | 0.021 | 0.016 | 0.016 |
| YOLOv5-ORB-SLAM2 | 0.016 | 0.013 | 0.011 | 0.009 |
| YOLOv5-ORB-SLAM3 | 0.015 | 0.012 | 0.010 | 0.009 |
| YOLOv5-ORB-SLAM3(Dense) | 0.014 | 0.011 | 0.010 | 0.008 |
表3
YOLO系列检测算法与本文方法性能对比
| 模型 | mAP@0.5/% | FPS | eAPE/m | 评价 |
|---|---|---|---|---|
| YOLOv8-ORB-SLAM3(Dense) | 89.6 | 15.6 | 0.215 | 提升了检测精度,但结构复杂,推理速度较慢,实时性略有下降 |
| YOLOv9-ORB-SLAM3(Dense) | 90.2 | 16.2 | 0.205 | 精度进一步提升,FPS表现优于YOLOv8,但动态环境中的稳定性欠佳 |
| YOLOv10-ORB-SLAM3(Dense) | 91.3 | 16.4 | 0.198 | 轻量化优化显著,实时性更高,但在动态目标检测中的鲁棒性较差 |
| YOLOv5-ORB-SLAM3(Dense) | 92.4 | 16.8 | 0.189 | 精度最高,定位误差最低,鲁棒性最佳,算力消耗低,适合部署 |
| [1] | 姜寒, 王凯. 面向变电站无人化巡检的多源融合即时定位与建图方法综述[J]. 广东电力, 2025, 38(3): 55-68. |
| JIANG Han, WANG Kai. A review of multi-source fusion SLAM methods for unmanned substation inspection[J]. Guangdong Electric Power, 2025, 38(3): 55-68. | |
| [2] |
刘涛, 李伟华, 汤熠. 综合智慧能源系统典型构架网络安全防护研究[J]. 综合智慧能源, 2024, 46(5): 81-90.
doi: 10.3969/j.issn.2097-0706.2024.05.010 |
|
LIU Tao, LI Weihua, TANG Yi. Security protection of typical networks for integrated smart energy systems[J]. Integrated Intelligent Energy, 2024, 46(5): 81-90.
doi: 10.3969/j.issn.2097-0706.2024.05.010 |
|
| [3] |
MUR-ARTAL R, MONTIEL J M M, TARDOS J D. ORB-SLAM: A versatile and accurate monocular SLAM system[J]. IEEE Transactions on Robotics, 2015, 31(5): 1147-1163.
doi: 10.1109/TRO.2015.2463671 |
| [4] |
CAI D P, LI R Q, HU Z H, et al. A comprehensive overview of core modules in visual SLAM framework[J]. Neurocomputing, 2024, 590: 127760.
doi: 10.1016/j.neucom.2024.127760 |
| [5] | 王仕仪, 张学峰, 任彬, 等. 基于SLAM的楼层巡检智能车设计[J]. 科学技术创新, 2022(21): 183-186. |
| WANG Shiyi, ZHANG Xuefeng, REN Bin, et al. Design of intelligent vehicle for floor inspection based on SLAM[J]. Scientific and Technological Innovation, 2022(21): 183-186. | |
| [6] | 赵康, 闫正义, 王凯. 光纤传感技术在电池荷电状态/健康状态监测中的研究进展[J/OL]. 发电技术, 2025: 1-12(2025-03-11)[2025-09-12]. https://kns.cnki.net/KCMS/detail/detail.aspx?filename=SLJX20250311001&dbname=CJFD&dbcode=CJFQ. |
| ZHAO Kang, YAN Zhengyi, WANG Kai. Research advances of fiber optic sensing technology in battery SOC/SOH monitoring[J/OL]. Power Generation Technology, 2025: 1-12(2025-03-11)[2025-09-12]. https://kns.cnki.net/KCMS/detail/detail.aspx?filename=SLJX20250311001&dbname=CJFD&dbcode=CJFQ. | |
| [7] |
李彬, 张文艳, 王庆宇, 等. 支撑新型电力系统客户侧互动业务的融合通信发展及展望[J]. 综合智慧能源, 2025, 47(11): 72-86.
doi: 10.3969/j.issn.2097-0706.2025.11.007 |
|
LI Bin, ZHANG Wenyan, WANG Qingyu, et al. Development and prospects of converged communications supporting customer-side interactive services in new-type power system[J]. Integrated Intelligent Energy, 2025, 47(11): 72-86.
doi: 10.3969/j.issn.2097-0706.2025.11.007 |
|
| [8] | 柳宁, 崔小军, 绳鹏鹏, 等. 基于SLAM的电厂巡检机器人导航技术实现[J]. 自动化与仪器仪表, 2023(7): 214-218. |
| LIU Ning, CUI Xiaojun, SHENG Pengpeng, et al. Implementation of navigation technology for power plant inspection robots based on SLAM[J]. Automation & Instrumentation, 2023(7): 214-218. | |
| [9] | TATENO K, TOMBARI F, LAINA I, et al. CNN-SLAM: Real-time dense monocular SLAM with learned depth prediction[C]// Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). IEEE, 2017: 6565-6574. |
| [10] | 蒋经纬, 吉月辉, 刘俊杰, 等. 基于轻量级CNN的视觉SLAM快速回环检测算法[J]. 计算机仿真, 2024, 41(8): 182-188. |
| JIANG Jingwei, JI Yuehui, LIU Junjie, et al. Visual slam fast loop detection algorithm based on lightweight CNN[J]. Computer Simulation, 2024, 41(8): 182-188. | |
| [11] | 王伟良. 动态环境下基于Mask R-CNN的ORB-SLAM研究[J]. 现代信息科技, 2020, 4(21): 80-83. |
| WANG Weiliang. Research on ORB-SLAM based on Mask R-CNN in dynamic environment[J]. Modern Information Technology, 2020, 4(21): 80-83. | |
| [12] | ENDO Y, SATO K, YAMASHITA A, et al. Indoor positioning and obstacle detection for visually impaired navigation system based on LSD-SLAM[C]// Proceedings of 2017 International Conference on Biometrics and Kansei Engineering (ICBAKE). IEEE, 2017: 158-162. |
| [13] | KLAPPSTEIN J, VAUDREY T, RABE C, et al. Moving object segmentation using optical flow and depth information[C]// Advances in Image and Video Technology.Berlin, Heidelberg: Springer, 2009: 611-623. |
| [14] |
CUI L Y, MA C W. SOF-SLAM: A semantic visual SLAM for dynamic environments[J]. IEEE Access, 2019, 7: 166528-166539.
doi: 10.1109/ACCESS.2019.2952161 |
| [15] | 陈明强, 李奇峰, 冯树娟, 等. 动态环境下基于深度学习的视觉SLAM[J]. 计算机与数字工程, 2024, 52(5): 1529-1535. |
| CHEN Mingqiang, LI Qifeng, FENG Shujuan, et al. Visual SLAM based on deep learning in dynamic environment[J]. Computer & Digital Engineering, 2024, 52(5): 1529-1535. | |
| [16] | 高利平, 林周勇, 柯一鸿, 等. 基于SLAM算法和动静态规划的电厂智能巡检机器控制研究[J]. 电子设计工程, 2024, 32(17): 191-195. |
| GAO Liping, LIN Zhouyong, KE Yihong, et al. Research on intelligent inspection machine control for power plants based on SLAM algorithm and dynamic and static planning[J]. Electronic Design Engineering, 2024, 32(17): 191-195. | |
| [17] | 白克强, 朱亚兰, 杨秀清, 等. 融合动态目标跟踪的视觉SLAM算法[J]. 信息与控制, 2024, 53(5): 574-584. |
| BAI Keqiang, ZHU Yalan, YANG Xiuqing, et al. Visual SLAM algorithm of integrating dynamic target tracking[J]. Information and Control, 2024, 53(5): 574-584. | |
| [18] | 付明磊, 卫宁伟, 金宇强, 等. 面向动态环境的视觉惯性定位方法[J]. 传感技术学报, 2024, 37(2): 268-277. |
| FU Minglei, WEI Ningwei, JIN Yuqiang, et al. Visual-inertial positioning method for dynamic environment[J]. Chinese Journal of Sensors and Actuators, 2024, 37(2): 268-277. | |
| [19] |
LIU J H, LI X F, LIU Y Q, et al. RGB-D inertial odometry for a resource-restricted robot in dynamic environments[J]. IEEE Robotics and Automation Letters, 2022, 7(4): 9573-9580.
doi: 10.1109/LRA.2022.3191193 |
| [20] |
WEI S, LI Z. An RGB-D SLAM algorithm based on adaptive semantic segmentation in dynamic environment[J]. Journal of Real-Time Image Processing, 2023, 20(5): 85.
doi: 10.1007/s11554-023-01343-2 |
| [21] |
LI F, CHEN W F, XU W F, et al. A mobile robot visual SLAM system with enhanced semantics segmentation[J]. IEEE Access, 2020, 8: 25442-25458.
doi: 10.1109/Access.6287639 |
| [22] |
YIN H S, LI S M, TAO Y, et al. Dynam-SLAM: An accurate, robust stereo visual-inertial SLAM method in dynamic environments[J]. IEEE Transactions on Robotics, 2023, 39(1): 289-308.
doi: 10.1109/TRO.2022.3199087 |
| [23] |
YUAN C F, XU Y L, ZHOU Q. PLDS-SLAM: Point and line features SLAM in dynamic environment[J]. Remote Sensing, 2023, 15(7): 1893.
doi: 10.3390/rs15071893 |
| [24] |
柯学良, 肖玮, 曲乃铸, 等. 基于光照不变特征提取和动态特征祛除的视觉SLAM算法[J]. 测绘通报, 2025(9): 105-111.
doi: 10.13474/j.cnki.11-2246.2025.0917 |
|
KE Xueliang, XIAO Wei, QU Naizhu, et al. A visual SLAM algorithm based on illumination-robust feature extraction and dynamic feature removal[J]. Bulletin of Surveying and Mapping, 2025(9): 105-111.
doi: 10.13474/j.cnki.11-2246.2025.0917 |
|
| [25] | 方福涛. 基于SLAM和IoT的仓储机器人的应用研究[J]. 中国设备工程, 2025(18): 98-101. |
| FANG Futao. Application research of storage robot based on SLAM and IoT[J]. China Plant Engineering, 2025(18): 98-101. | |
| [26] | 王庆, 史晓琼, 严超, 等. 基于动态多目标追踪与背景提取的视觉SLAM方法[J]. 中国惯性技术学报, 2025, 33(9): 856-863. |
| WANG Qing, SHI Xiaoqiong, YAN Chao, et al. Visual SLAM method based on dynamic multi-object tracking and background extraction[J]. Journal of Chinese Inertial Technology, 2025, 33(9): 856-863. | |
| [27] | HOU Q B, ZHOU D Q, FENG J S. Coordinate attention for efficient mobile network design[C]// Proceedings of 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). IEEE, 2021: 13708-13717. |
| [28] | 尚玉朝, 刘春豪, 王凯. 基于融合优化算法的超级电容器健康状态预测模型[J/OL]. 发电技术, 2025: 1-11 (2025-01-17)[2025-09-12]. https://kns.cnki.net/KCMS/detail/detail.aspx?filename=SLJX20250117001&dbname=CJFD&dbcode=CJFQ. |
| SHANG Yuzhao, LIU Chunhao, WANG Kai. A state of health prediction model for supercapacitors based on an integrated optimization algorithm[J/OL]. Power Generation Technology, 2025: 1-11(2025-01-17)[2025-09-12]. https://kns.cnki.net/KCMS/detail/detail.aspx?filename=SLJX20250117001&dbname=CJFD&dbcode=CJFQ. | |
| [29] | 时洪雷, 刘喜军, 高竟译, 等. 基于超参数优化和混合神经网络的锂硫电池健康状态估计[J/OL]. 储能科学与技术, 2025: 1-11 (2025-09-11)[2025-09-12]. https://link.cnki.net/doi/10.19799/j.cnki.2095-4239.2025.0608. |
| SHI Honglei, LIU Xijun, GAO Jingyi, et al. State of health estimation of lithium-sulfur batteries based on hyperparameter optimization and hybrid neural networks[J/OL]. Energy Storage Science and Technology, 2025: 1-11(2025-09-11)[2025-09-12]. https://link.cnki.net/doi/10.19799/j.cnki.2095-4239.2025.0608. | |
| [30] |
张考, 何凯琳, 杨沛豪. 基于模糊强化学习的电力变压器故障诊断算法研究[J]. 综合智慧能源, 2024, 46(10): 48-55.
doi: 10.3969/j.issn.2097-0706.2024.10.007 |
|
ZHANG Kao, HE Kailin, YANG Peihao. Research on power transformer fault diagnosis algorithm based on fuzzy reinforcement learning[J]. Integrated Intelligent Energy, 2024, 46(10): 48-55.
doi: 10.3969/j.issn.2097-0706.2024.10.007 |
|
| [31] | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: Unified, real-time object detection[C]// Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). IEEE, 2016: 779-788. |
| [32] |
任一鸣, 杜董生, 邓祥帅, 等. 基于Real-ESRGAN和改进YOLOv8n的输电线路绝缘子故障检测[J]. 综合智慧能源, 2024, 46(7): 29-39.
doi: 10.3969/j.issn.2097-0706.2024.07.004 |
|
REN Yiming, DU Dongsheng, DENG Xiangshuai, et al. Fault detection of transmission line insulators based on Real-ESRGAN and improved YOLOv8n[J] Integrated Intelligent Energy, 2024, 46(7): 29-39.
doi: 10.3969/j.issn.2097-0706.2024.07.004 |
|
| [33] | Redmon J, Farhadi A. Yolov3:An incremental improvement[J]. arXiv Preprint, 2018: 1804.02767. |
| [34] | WANG C Y, MARK LIAO H Y, WU Y H, et al. CSPNet: A new backbone that can enhance learning capability of CNN[C]// Proceedings of 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). IEEE, 2020: 1571-1580. |
| [35] |
GAO S H, CHENG M M, ZHAO K, et al. Res2Net:A new multi-scale backbone architecture[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2021, 43(2): 652-662.
doi: 10.1109/TPAMI.34 |
| [36] | 高翔, 张涛. 视觉SLAM十四讲:从理论到实践[M]. 2版. 北京: 电子工业出版社, 2019. |
| [1] | 梁倍宁, 殷林飞. ADC-YOLO:面向绝缘子巡检的轻量化动态注意力检测器[J]. 综合智慧能源, 2026, 48(2): 1-14. |
| [2] | 徐嘉豪, 徐俊俊. 基于时空多视图学习的智能变电站远动终端不良数据恢复[J]. 综合智慧能源, 2026, 48(2): 15-26. |
| [3] | 崔向虎, 徐越飞, 戚佳金, 张静, 陈世喆, 李金诺. 基于多源特征融合去噪网络的配电网故障辨识方法研究[J]. 综合智慧能源, 2026, 48(2): 27-36. |
| [4] | 吴小欢, 沈景贵, 张欣, 胡裕民, 徐烨玲, 石明玉. 基于BMF-GADF与改进Swin Transformer的配电网故障选线方法[J]. 综合智慧能源, 2026, 48(2): 86-95. |
| [5] | 李祯, 杨国华, 张元曦, 马鑫, 杨娜, 刘浩睿, 马龙腾. 基于模态二次分解和OOA-CNN-BiLSTM-Attention的光伏发电功率组合预测[J]. 综合智慧能源, 2025, 47(9): 28-37. |
| [6] | 蒋剑, 杜董生, 苏林. 基于改进HHO-LSTM-Self-Attention的质子交换膜燃料电池剩余使用寿命预测[J]. 综合智慧能源, 2025, 47(6): 47-56. |
| [7] | 殷林飞, 张依玲. 基于多重卷积组合大模型的光伏出力预测[J]. 综合智慧能源, 2025, 47(4): 63-72. |
| [8] | 杨澜倩, 郭锦敏, 田慧丽, 黄畅, 刘敏, 蔡阳. 基于CNN-LSTM-Self attention的园区负荷多尺度预测研究[J]. 综合智慧能源, 2025, 47(2): 79-87. |
| [9] | 任一鸣, 杜董生, 邓祥帅, 连贺, 赵哲敏. 基于Real-ESRGAN和改进YOLOv8n的输电线路绝缘子故障检测[J]. 综合智慧能源, 2024, 46(7): 29-39. |
| [10] | 张文强, 李加树, 宣洋, 李辰, 钱杭, 张啸宇. 基于多尺度融合和改进YOLOv8n的光伏缺陷检测方法[J]. 综合智慧能源, 2024, 46(11): 29-37. |
| [11] | 李方一, 李楠, 周琰, 谢武. 基于多维数据与深度学习的区域发电碳排放因子预测研究[J]. 综合智慧能源, 2023, 45(8): 11-17. |
| [12] | 刘文慧, 严博文, 吴江, 任一君, 孔维政, 谌际宇. 基于平行控制理论的循环流化床锅炉床温智能预测模型[J]. 综合智慧能源, 2022, 44(3): 50-57. |
| [13] | 付豪, 邹花蕾, 张腾飞. 基于长短期记忆循环神经网络的变电站监控系统智能故障推理方法[J]. 综合智慧能源, 2022, 44(12): 11-17. |
| [14] | 王立鼎, 詹庆才, 殷建军, 杨常府, 王均慧, 聂晓波. 变电站站用电源系统在线状态评估系统架构及关键策略研究[J]. 华电技术, 2021, 43(5): 15-22. |
| [15] | 郑丽娟, 郭强, 胡翔, 关山, 李吉献. 基于物联网信息集成的箱式变电站运行状态综合监控系统研究[J]. 华电技术, 2021, 43(1): 12-18. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||